一,浅聊一下webots各个版本文件格式的导入导出
首先,早版本的webots是支持import VRML97的,例如webots 2020a。
但是随着webots的更新,到webots2022a支持URDF文件的导入导出,STL,dae,obj的文件格式的导入。SolidWorks可以导出URDF文件和STL文件
但在webots2022b后版本,文件菜单里就空空如也,但也可以导入一些东西。
二,具体的操作
因为VRML97,STL,URDF等文件的格式在网络上的视频与文章已经很多了,我这里就不赘述了,我下面主要讲两个方面:一是利用代码实现高低版本模型的导入导出,二是2022b版本以后的导入。
1,利用代码实现高低版本模型的导入导出
在我们使用webots的过程中,我们可能会去下载他人的webots模型,这时就涉及到了高低版本的导入导出问题。首先,讲一下webots user guide中的Tutorial 7中的First PROTO,这个主要教我们如何建立自己的节点,这个就是可以把我们创作过的一些模型啊,假如你要在其他世界使用,就可以导出这个模型,先在是以2022b之前的版本为例,当然,高版本也是支持的。
在你建立好的robot右键
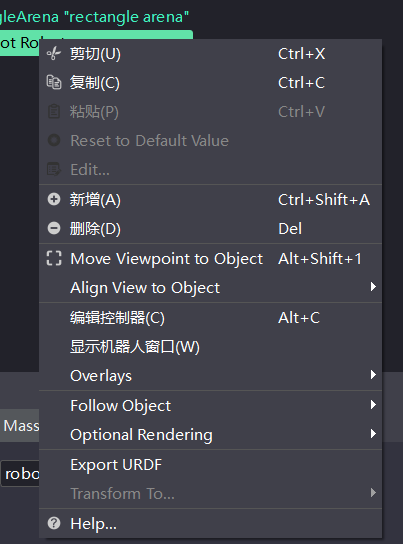
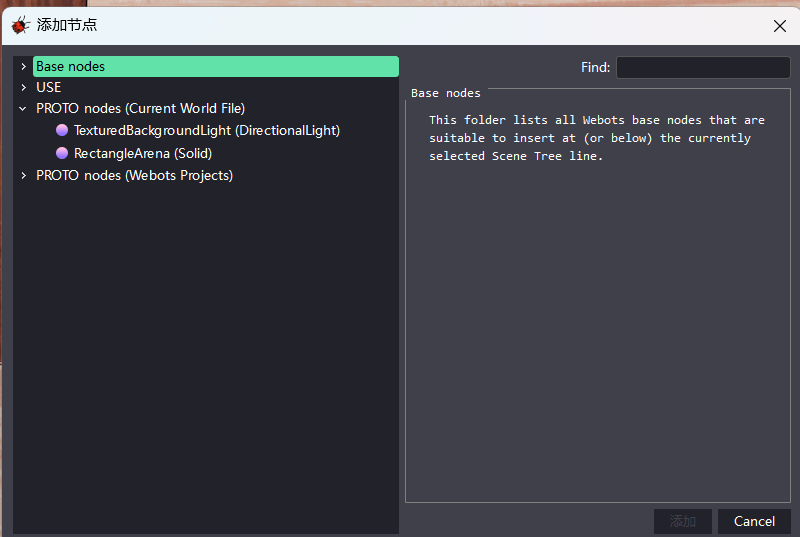
我这个是高版本的,低版本应该可以导出wbt文件,导出这个文件之后,我们可以把这个文件放入到你想要导入的世界的project中的protos文件中,之后你就可以点击新增,在proto nodes(current project)文件中找到这个。
这个说完了以后,下面就是代码的做法
首先你需要在project下面的protos文件下面新建一个,名称.proto的文件,把这个文件在vscode或者代码软件上打开,紧接着,你把下面这段代码复制上去
PROTO abc//把这里填写与你proto相同的名字和wbt的名字 [
field SFVec3f translation 0 0 0
field SFRotation ritation 0 1 0 0
field SFFloat bodyMass 1
]
{
Robot{
translation IS translation
rotation IS translation
children[
]
boundingObject USE BODY
physics Physics{
density -1
mass IS bodyMass
}
controller "PID_Track"//这里是控制器名称
}
}
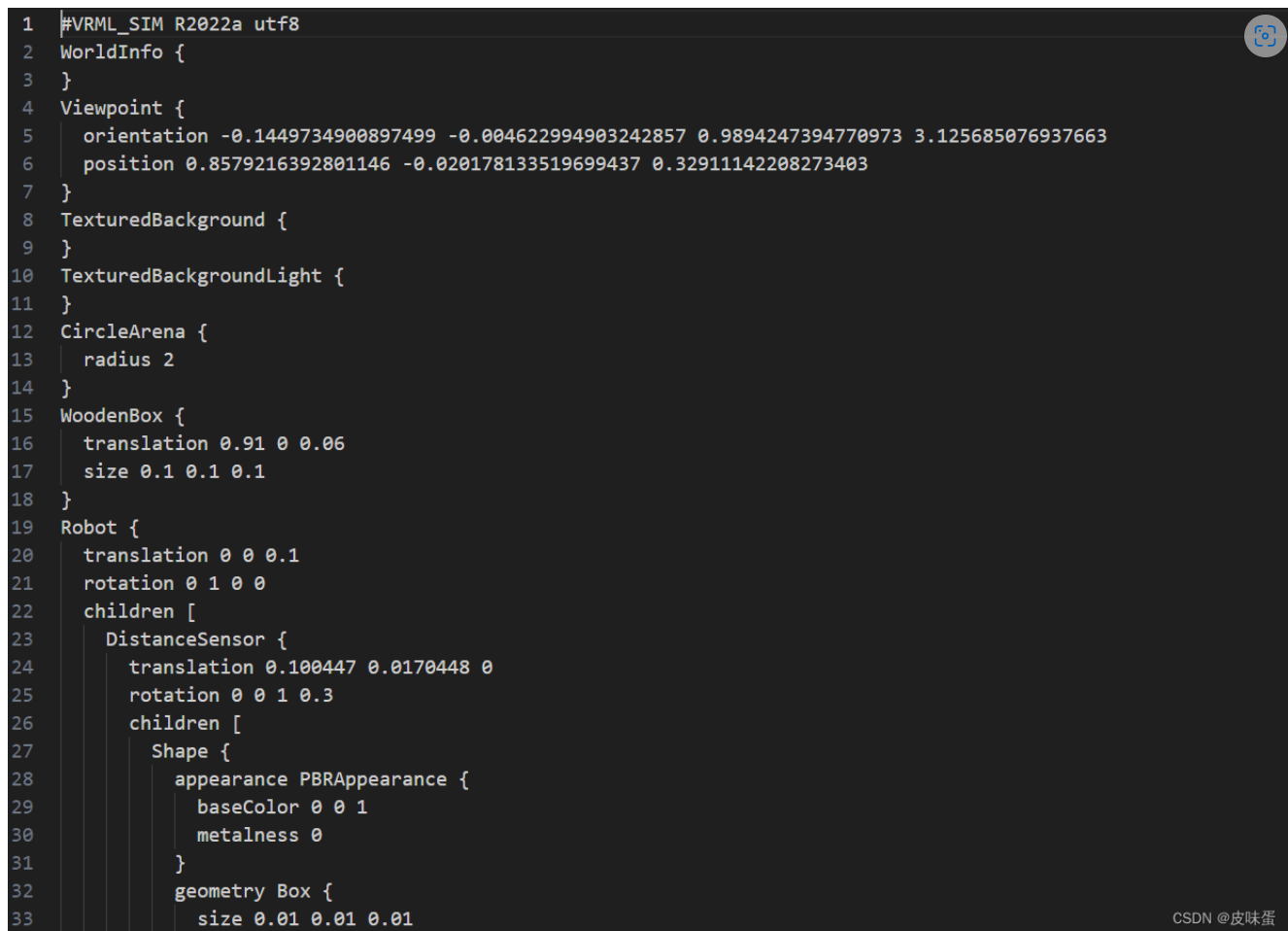
之后,你可以把一个高版本的世界通过vscode打开,也就是.wbt文件通过vscode打开,这时,你会发现是一段代码,这段代码是VRML语言写的,然后根据你的需要可以把高版本的世界里面的robot,依照上面的格式一点点复制进去。最后,你就可以在低版本中打开这个模型机器人。

2,2022b版本以后的导入
这里我后面再添加,可以看看我好兄弟的视频 https://link.csdn.net/?target=https%3A%2F%2Fwww.bilibili.com%2Fvideo%2FBV1YG4y1L73Q%2F%3Fspm_id_from%3D333.337.search-card.all.click
原文链接:https://blog.csdn.net/qq_58870446/article/details/137232162
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。